演示案例
系统设置
开机后建议关闭CPU自动调频,在root下执行以下命令:
$ su - $ echo performance > /sys/devices/system/cpu/cpu0/cpufreq/scaling_governor
开启HailoRT的Monitor(可选)
- 执行以下命令,开启Hailo
monitor,实时监控NPU设备的利用率,使用的模型以及输出的FPS等数据:
$ hailortcli monitor
图 1. 开启Hailo Monitor 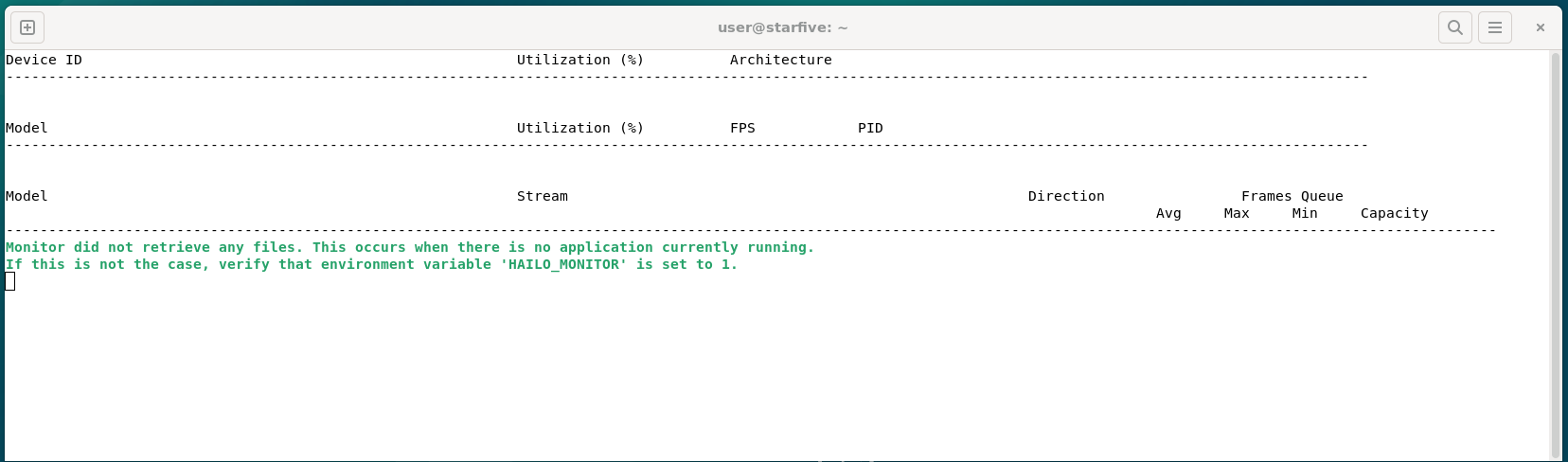
- 另开一个shell(此shell必须为运行演示程序的shell),指定环境变量:
$ export HAILO_MONITOR=1图 2. 指定环境变量 
- 执行演示案例时,HailoRT检测到此shell进程的HAILO_MONITOR变量为1,则会实时输出NPU模块的相关监测数据:
图 3. 监测数据 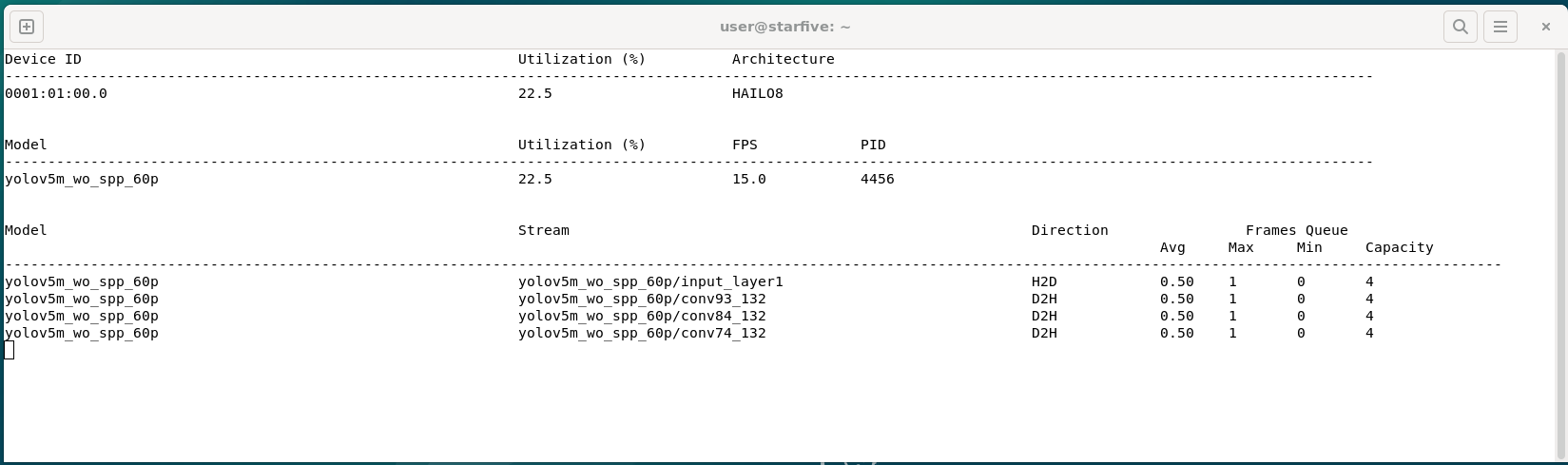
Tappas演示案例
昉·星光 2下可直接使用Tappas下的部分演示案例。
注: 由于Tappas下的演示案例使用的GStreamer
videosink为xvimagesink以及ximagesink,而昉·星光 2的Debian使用的Wayland协议,这些演示均需修改其启动脚本,将其中的video_sink_element中的ximagesink修改为waylandsink:图 4. 修改启动脚本


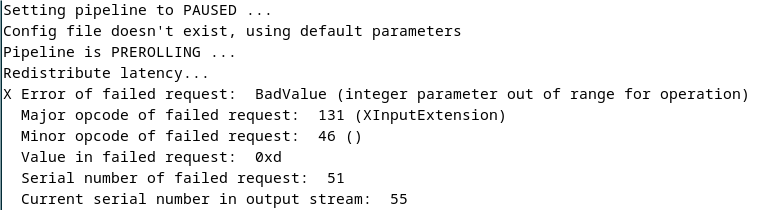
否则在运行时会产生以下报错:图 5. 报错
- Instance_segmentation:
$ cd /home/user/tappas/apps/h8/gstreamer/vf2/instance_segmentation/ $ ./instance_segmentation.sh -i /dev/video4
注: 命令中的/dev/video4指定使用USB Camera。 - Detection:
$ cd /home/user/tappas/apps/h8/gstreamer/vf2/detection/ $ ./detection.sh -i /dev/video4 --network yolov5
注: 通过—network指定使用yolov5模型。 - Cascading_networks:
$ cd /home/user/tappas/apps/h8/gstreamer/vf2/cascading_networks/
- object_detection_and_pose_estimation用例:
$ ./object_detection_and_pose_estimation.sh -i /dev/video4
注: 如出现以下报错,请检查是否缺少了TAPPAS_WORKSPACE环境变量。图 6. 报错 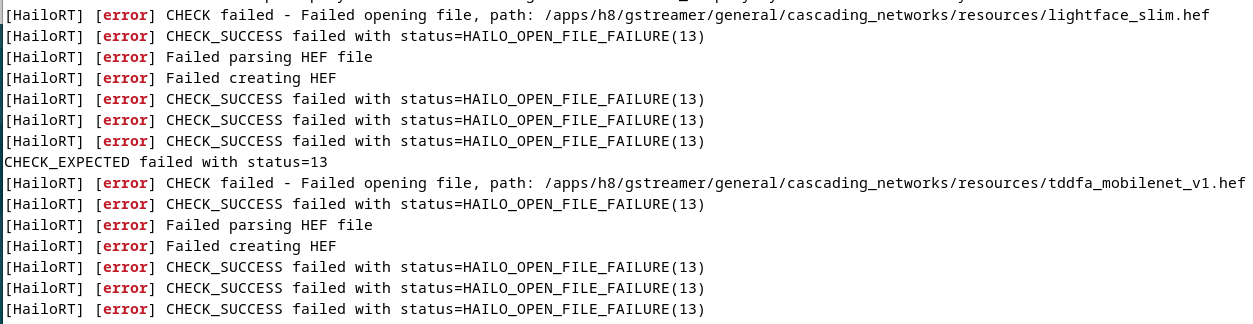
解决方法:可设置环境变量为
export TAPPAS_WORKSPACE=path_to_tappas/tappas/,其中的path_to_tappas为Tappas源码目录所在路径。
- object_detection_and_pose_estimation用例:
NpuDetectorLib演示案例
- 执行以下命令,下载并编译NpuDetectorLib:
$ tar -xvf NpuDetectorLib.tar $ cd NpuDetectorLib $ cmake -H. -Bbuild -DSHOW_LABEL=ON -DBUILD_TESTER=ON $ cmake --build build
- 下载所需的资源:
$ wget -O models/yolov8s_nms.hef https://hailo-model-zoo.s3.eu-west-2.amazonaws.com/ModelZoo/Compiled/v2.13.0/hailo8l/yolov8s.hef
- 执行以下命令,进行目标识别演示:
$ ./build/tests/TestExecutable -i /dev/video4 -m models/yolov8s_nms.json -a yolov8_nms